Equiprojectivité
Théorème
Soient deux points
 et
et
 appartenant à un même solide
appartenant à un même solide
 en mouvement plan par rapport à un solide de référence
en mouvement plan par rapport à un solide de référence
 auquel on associe le repère
auquel on associe le repère
 .
.
Soient
 et
et
 les vecteurs vitesse respectifs de ces points dans le mouvement de
par rapport à
.
les vecteurs vitesse respectifs de ces points dans le mouvement de
par rapport à
.
La projection orthogonale de
sur
 est égale à la projection orthogonale de
sur
.
est égale à la projection orthogonale de
sur
.
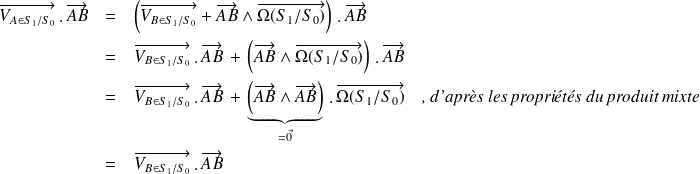
Complément : Démonstration
D'après le champ des vecteurs vitesse :
Application graphique
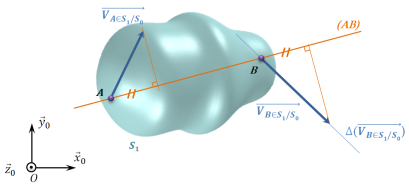
Méthode : Equiprojectivité
Connaissant :
le vecteur vitesse en un point
de
en mouvement plan sur plan par rapport à
:
,
le support du vecteur vitesse en autre point B :
 ,
,
on peut construire graphiquement le vecteur vitesse du point B :
On trace la droite
.On construit la projection de
sur
.On reporte cette projection au point B, du même coté du point.
On en déduit
car

(
a la même projection sur
que
).
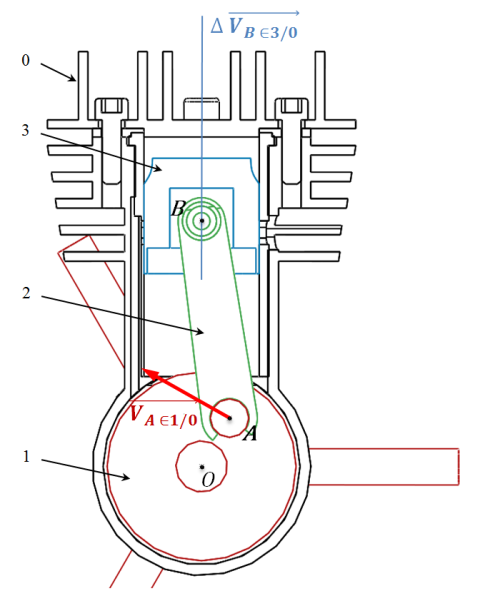
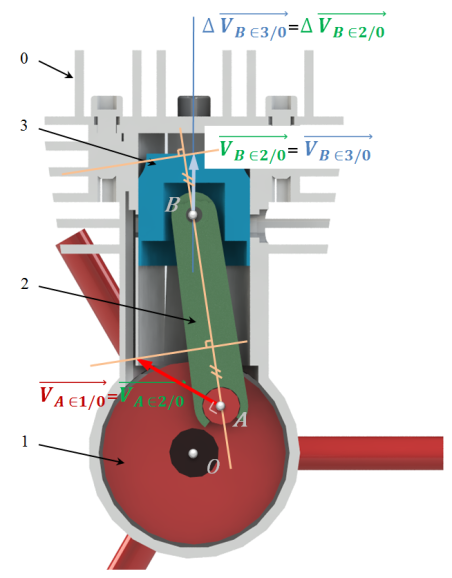
Exemple : Micromoteur de modélisme
On suppose que
,
 et
et
 ont des mouvements plans sur plans de normale
ont des mouvements plans sur plans de normale
 par rapport au carter
.
par rapport au carter
. On donne
 et le support
et le support
 .
.
→ Déterminer graphiquement
 en utilisant l'équiprojectivité.
en utilisant l'équiprojectivité.
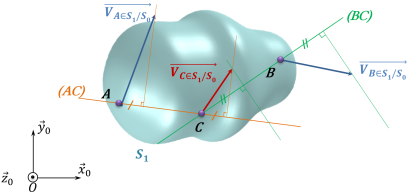
Méthode : Double équiprojectivité
Connaissant :
le vecteur vitesse en un point
de
en mouvement plan sur plan par rapport à
:
,le vecteur vitesse en un autre point
de
par rapport à
:
,
on peut construire graphiquement le vecteur vitesse de n'importe quel autre point
 du solide
du solide
 :
:
On trace les droites
 et
et
 .
.On applique deux fois l'équiprojectivité telle que décrite au paragraphe précédent :
 et
et

On en déduit